Watch on YouTube: https://youtu.be/9DRUsJ0YmC4
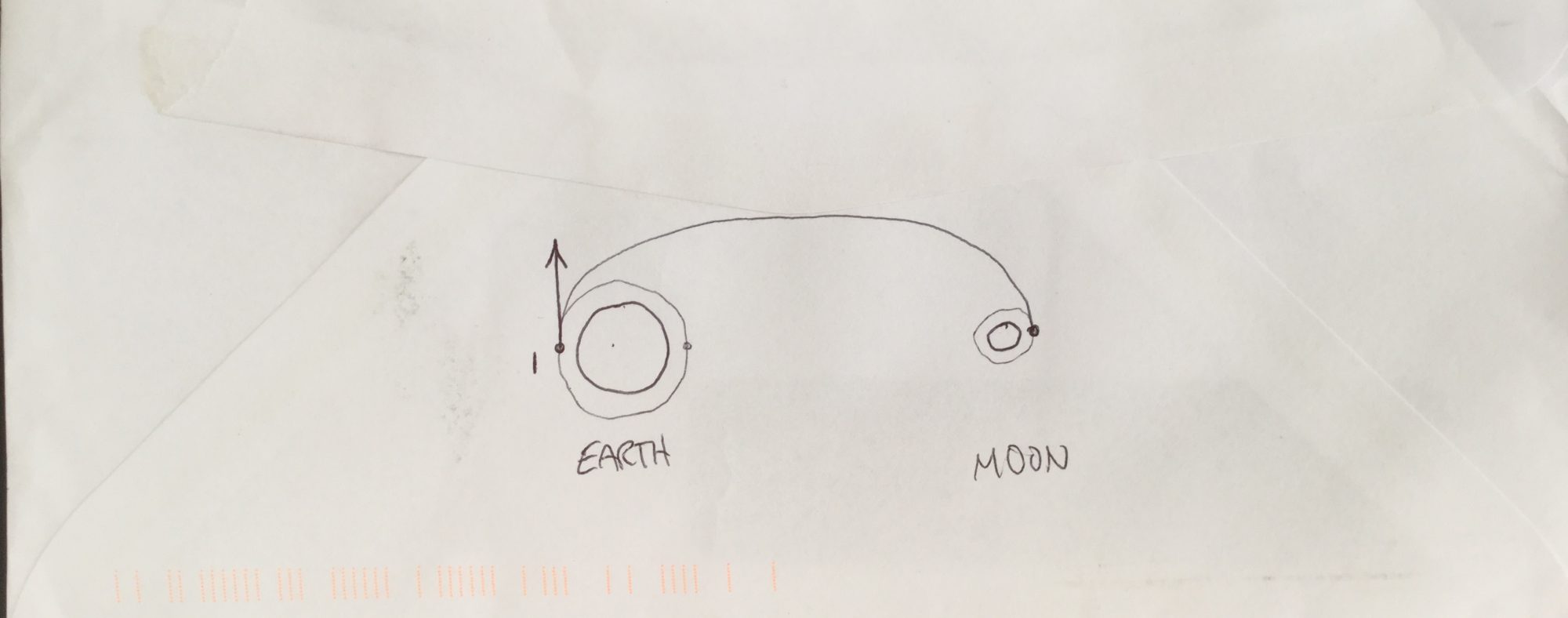
In the realm of hard problems, Kerbal Space Program offers many options. This story focuses on one such problem: land a single Kerbal on both moons in a single mission and return safely using the lowest budget at takeoff. There’s a lot to cover here, so let’s dive right in.
At first, the engineers focused on landing only on Mun and returning. We knew every design decision would be critical to the success of the mission. The first iteration used just a command chair and one of each of the things Jeb needed to maintain control of the vessel. We even considered leaving the battery out, but quickly realized the engine gimballing alone would make it very difficult to pilot. Everyone wanted to give Jeb at least a fighting chance of landing this thing.
It was immediately clear the optimal design would include a big first stage, deploying a tiny orbital vehicle payload to low Kerbin orbit. So, the team hastily assembled the first prototype, and Jeb hopped into the cramped quarters of its command seat. Looking back, it’s pretty clear the fairing was a lot more luxurious than originally anticipated. It ended up being basically a motorcycle in space. The view was amazing!
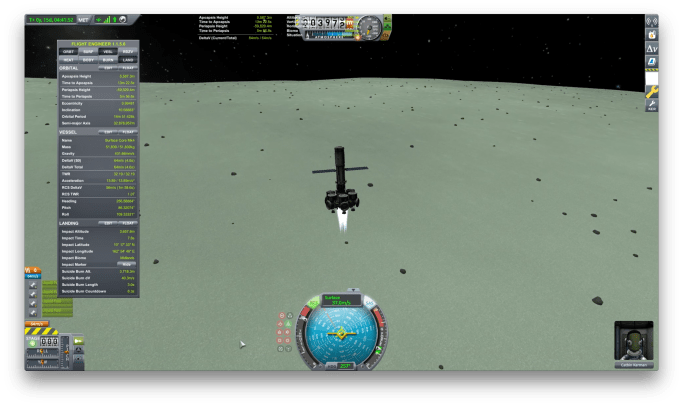
From low Kerbin orbit, Jeb aimed for a low Mun periapsis to take full advantage of the Oberth effect. Dropping in around 6km, he charted a retrograde burn to settle into a nice equatorial orbit before descending into the munar highlands. He knew he would need less energy to return to orbit if he landed at a high altitude. The landing was amazingly smooth … until the last moment, when there was an unexpected jerk in the pitch input. Forensic evidence from the, uh, “returned craft” would reveal the retrograde vector bounced off the ground plane and went negative. Jeb had to react quickly to prevent catastrophe. His report explicitly praised the helmet designers.
As he left the Mun surface, he pondered his likelihood of surviving the re-entry into Kerbin’s atmosphere without any kind of enclosure. He had to jettison the engine to reveal the heat shield he would use to keep cool during the aerobraking maneuver. The engineers warned about the possibility of some light heating on the re-entry, but Jeb got an A in ablative materials class. He knew this was a suicide mission. He had mistakenly dropped the Kerbin periapsis too low when leaving the Mun, and he had no fuel left to correct the mistake. He hoped for the best, but…
After an appropriate mourning period, Jeb’s brother Jeb announced he would honor his brother’s sacrifice with another attempt. He would use the same craft, but he would make a few adjustments first. He liked the overall design, but he felt there should be just a little more fuel in the third stage. The resulting fairing was a little too close for comfort on the ascent, but he felt like it was a rite of passage and left the discomfort out of his report.
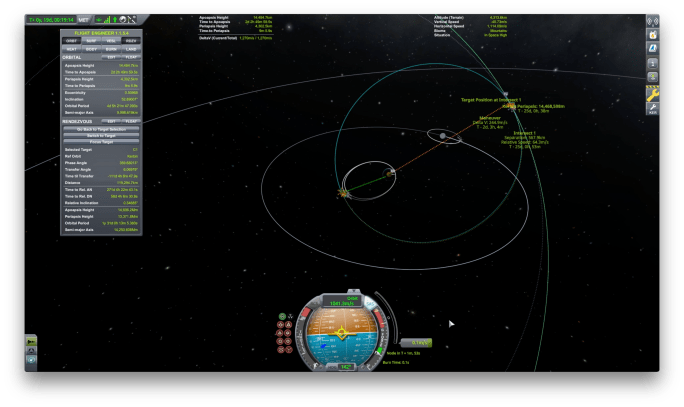
Just like his brother before him, Jeb was able to pilot his modified craft to a smooth Mun landing. And just like his brother, his landing suffered the same awkward pitch jerk, bouncing off the ground. We really need to get that fixed… The landing must have disoriented Jeb. Before the medical team could assess him – and against the advice of the ops team – Jeb decided to chart a course to Minmus. They told him there was no way he could make it, but he tried anyway. Given the recent loss of his brother, everyone at the Kerbal Space Center took this news pretty hard.
It was pure determination that motivated their other brother Jeb to take bold action. At this point, all of Kerbin was devastated by the loss of two intrepid Kerbonaut brothers. The entire planet was reinvigorated when he decided to make another attempt. So, we rallied behind him, made some radical changes to the flight vehicle, and prepared for another potentially demoralizing flight.
This time, we acknowledged the fairing was enough to protect the pilot, but we couldn’t keep it past ascent circularization without making it impossible for the pilot to have any visibility. The only compromise was to use the next lightest part. So, Jeb reluctantly agreed to move the command chair into a service bay. With the doors open, he would be able to see straight up, but the forward view would be fully obstructed. He was going to need to land on instruments alone, and he was up for the challenge.
As he slowly ascended to low Kerbin orbit, he remarked on the durability of this new vehicle. We redesigned the orbital payload to increase the second stage fuel capacity. This gives Jeb enough fuel to land on Mun and begin to return to orbit. The third stage completes the Mun orbit burn, as well as the transfer to Minmus, deorbit, and land. However, Jeb will need almost all the fuel to return to Minmus orbit and transfer into a Kerbin aerobrake orbit.
The engineers agreed with the protective enclosure of the service bay, we could remove the heat shield and use the very highest part of the atmosphere to brake. With the service bay doors closed, Jeb simply kept the vehicle’s only solar panel pointed toward the star and waited in terror for his brother’s fate. He was happy to sacrifice some time to stay alive, so he aimed for a shallow aerobrake at 68km. This proved quite successful, as his suit temperature reported nominal all the way through the aerobrake maneuver and resulting re-entry.
Without the benefit of any space to work, Jeb relied on his instincts to chart a re-entry course, aiming to land at Kerbal Space Center. Subconsciously, he was afraid of exploding, but history will say he was unable to navigate around some troublesome weather, or something like that. As he opened the service bay doors and left his command chair for the last time, he felt thankful for the opportunity to try this in a simulator first. We had all learned some valuable lessons from the practice sessions. Jeb reflected on one particular experience, where he lost consciousness leaving the seat and woke up without enough time to deploy a chute. This time would be different.
As he watched his faithful chariot drift away to inevitable oblivion, Jeb thought about all the hard work and sacrifice made by his family and the engineers who made it all possible. He decided to retire. After all, he now held the record for the best attempt, and his family suffered a heavy burden in the process. He would forever be known as the first pilot to complete the Kerbin Moon Circuit Royale. But, he would not be the last…